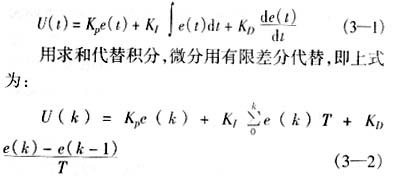
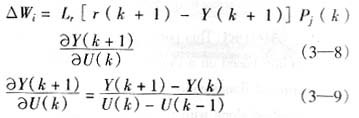
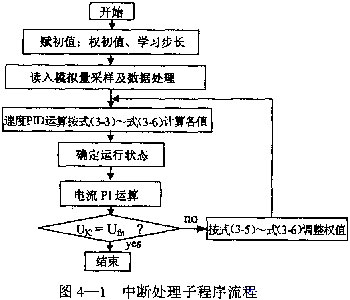
The system is for the DC motor of the W160 type floor boring machine X, Y, Z3 with the maximum speed of 3 000r/min and the minimum speed ≤30r/min. It realizes static static error S=0, speed range D ≥1 000; dynamic current overshoot σι/%≤5%, speed overshoot σn%≤10% stepless speed regulation system. In the DC reversible double closed-loop speed control system, a two-stage PID controller is required for adjustment, but to achieve such high-precision speed regulation, it is difficult to achieve the system requirements simply by using a conventional PID controller. With the development of neural network theory, combining the most widely used PID controller with the neural network with self-learning function has become a new direction of intelligent control, and some research results have been achieved in this respect. The PID adaptive controller composed of single neurons integrates the PID control law into the neural network, realizes the essential combination of the neural network and the PID control law, and completes the PID white adaptation adjustment. Its network structure is shown in Figure 1-1. It is a dynamic forward network consisting of two units: proportional, integral and differential. The number of neurons in each layer, the connection method and the connection weight are controlled by PID. The basic principles and existing experience can ensure the stability and rapid convergence of the system. In this paper, the neural network PID adaptive control is realized by PLC, and it is applied to the DC logic loopless reversible speed control system, so that the control precision of the system can reach the static difference that can only be realized theoretically. Second, the composition of the PLC control system According to the dynamic and static performance requirements of the W160 floor-standing boring machine DC speed control system, taking into account the higher requirements of the equipment's control equipment and components, and the higher requirements for safe and reliable operation of the system, the high-reliability PLC is used as the control core. The thyristor is the DC speed control system of the actuator, which replaces the AC motor of the original equipment and the generator has a large speed control system. The speed control system realized by PLC is shown in Figure 2-1. The system is mainly composed of two parts, among which the PLC realizes the control part of the neural network PID adaptive controller and the logic loopless double closed loop. The long and short dash line is a (V--M) three-phase bridge thyristor Motor system, GT is the thyristor trigger circuit of V--M system, which is realized by hardware. The dash line in the dotted line is a commutating soft switch, which is realized by PLC software. The system is a speed and current double closed-loop speed control system, that is to say, the PLC performs two-stage PID operation of the speed regulator and the current regulator in series on the three analog input signals, and gives the phase shift voltage to the trigger circuit of the thyristor. signal. Therefore, the rapidity and control accuracy of the system depends on the design and adjustment accuracy of the PID regulator. The PID adaptive controller composed of single neurons has the advantages of the traditional PID controller, the parallel structure of the neural network and the learning and memory function, and the structure is simple and easy to implement, so it is more suitable for the control system. Third, PID adaptive controller The conventional PID control algorithm is: In equation (3-2), T is the sampling period, Kp is the proportional coefficient, K 1 = Kp = T I is the integral proportional coefficient, and K D = K P T D is the differential proportional coefficient. According to the above formula, a controller constructed by a two-layer linear neural network is constructed, as shown in Fig. 1-1. The gradient control method can be used to obtain the neural network PID control coefficient correction formula: Where r is the system given value, Y is the system output value, and Lr is the learning step size: 0<Lr<1 For the initial value of Wi and the learning step, it is not only related to whether it reaches the global minimum point, but also affects the length of learning time. It is especially important for the high precision, fast response system that this article is directed to. Fourth, PLC-based adaptive control method In the DC double closed-loop speed control system, in order to improve the rapid response of the system and the necessity of current limiting, the current inner loop still uses the traditional PI regulator, while the speed loop uses the neural network PID adaptive controller to improve the system. Robustness. The PID operations of the two stages in series are implemented by the PLC, and this operation is handled as an interrupt program. The PID adaptive control interrupt processing subroutine flow of PLC is shown in Figure 4-1. Program the PLC according to the functions to be realized by the system and the characteristics of the PLC sequence execution program. The system configuration of Siemens S7-200 series PLC is adopted. According to the requirements of the actual operation of the logic loopless reversible DC speed regulation system, PLC mainly realizes two-stage series PID adaptive adjustment and logic commutation. At the same time, system protection functions and system display functions are also implemented. V. Conclusion The neural network PID adaptive controller realized by PLC is applied to the speed control system with high control precision, economical reliability and strong anti-interference ability. It can maintain the response within the range of allowable load, armature resistance and moment of inertia. Fastness and excellent performance without static or overshoot. It is especially suitable for the machine control system, which can realize the speed regulation part, and also can use the application characteristics of the PLC sequence control to replace the rest of the relay control part, which makes the system compact and easy to maintain. Kitchenware Products,Kitchen Accessories,Fruit Peeler Leqishi Plastic Products Co., Ltd. , http://www.plastic-food-containers.com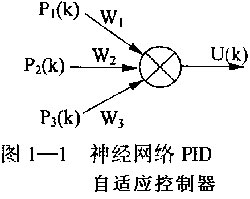



Application of PID Adaptive Controller in Speed ​​Control System
I. Introduction